

Accelerate your move to a high performance 48V power delivery network
This eBook provides guidance on designing 48V power delivery networks to enhance the performance, efficiency, and reliability of industrial products
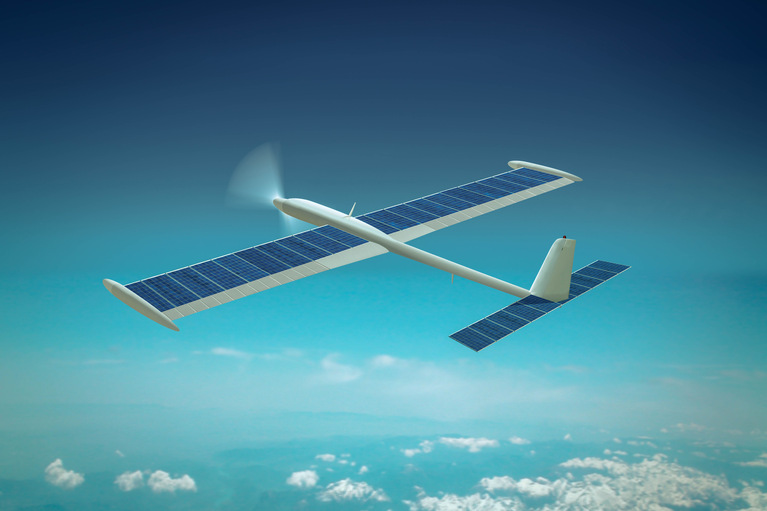
Case study: Inspection UAVs
This class of UAV depends on solar power to meet its long flight time requirements. Solar power systems rely on the use of maximum powerpoint tracking (MPPT) circuitry to ensure that solar energy is harvested at the optimum voltage before conversion to a voltage suitable for charging a secondary battery, or delivery to the power system’s intermediate bus network. The key goals were:
As this class of UAVs develops, high-efficiency power-conversion topologies such as Zero-Voltage Switching and Zero-Current Switching (ZVS/ZCS) which are used in Vicor BCMs® are important to enable the widening variety of fuel sources and applications with increasing power challenges.
Efficiently convert high voltages to SELV
Lightweight power delivery network
Wide input range at point-of-load conversion
A combination of the BCM6123 providing the isolated conversion of the 350V to a 48V intermediate bus and the PI3741 ZVS Buck-Boost regulator with a very wide range input voltage operating capability provides a tightly regulated 28V output for various UAV loads.

絶縁 電圧変換比固定
入力電圧: 800 – 48V
出力電圧: 2.4 – 55.0V
出力電流: 最大150A
ピーク効率: 98%
22.0 x 16.5 x 6.7mm 他
Accelerate your move to a high performance 48V power delivery network
This eBook provides guidance on designing 48V power delivery networks to enhance the performance, efficiency, and reliability of industrial products
Build better UAVs using modular power
Power Delivery Networks (PDN) based on Vicor high performance power modules enable innovative designs for the next generation of UAV development
High-efficiency, high-density modules free up space for advanced communications and extend range
High-efficiency class of UAV depend on solar power to meet its long flight time requirements
High-density, high-power modules enable lighter, safer, lower cost tether cables to extend missions
This class of unmanned vehicle is powered and controlled via a tether from a ground-based power source assisting in extended missions

